![Switching to RAMPS 1.4 – Wiring [ANET/TronXY]](http://3d-maker.info/wp-content/uploads/2017/07/cropped-IMG_20170512_191407.jpg)
![Switching to RAMPS 1.4 – Wiring [ANET/TronXY]](http://3d-maker.info/wp-content/uploads/2017/07/cropped-IMG_20170512_191407-1536x200.jpg)
Hardware
You can either buy a full kit or all parts individually. Buying a kit is mostly cheaper and therefore is recommended. These kits are either available from amazon or the typical chinese vendors.
Stepper Drivers
Update: Got my DRV8825 drivers and i can’t recommend them because the stepper drivers are not compatible with these stepper drivers. Everything works, but there is a loud very high pitch noise. Thats because the motors are low-current stepper motors.
| A4988 | Banggood | Gearbest | Polulu |
| DRV8825 | Banggood | Gearbest | Polulu |
| TMC2100 | Banggood | Watterott |
For stepper drivers there are multiple options. The basic ones are the A4988, which only have micro stepping up to 1/16. These were also on the original melzi board. The DRV8825 are capable of 1/32 microstepping, and should be a bit quieter and provide more current. The top tier stepper drivers are the TMC2100, which have a stealthChop and spreadCycle mode so they are the most quiet. They also support 1/256 microstepping. However for the RAMPS you will only use 1/16 microstepping interpolated to 1/256. Unfortunately they are quite expensive with over 10€ for one stepper driver. Other version like DSP drivers won’t be treated following.
Additionals
| Mosfet | Banggood | Aliexpress | |
| Inductive Sensor (5V) | Banggood | Gearbest | Aliexpress |
| Capacitive Sensor | Banggood | Aliexpress | |
| original BL-Touch | Ebay | Indiegogo | |
| BL-Touch clone / 3DTouch | Aliexpress |
Replacing the connectors
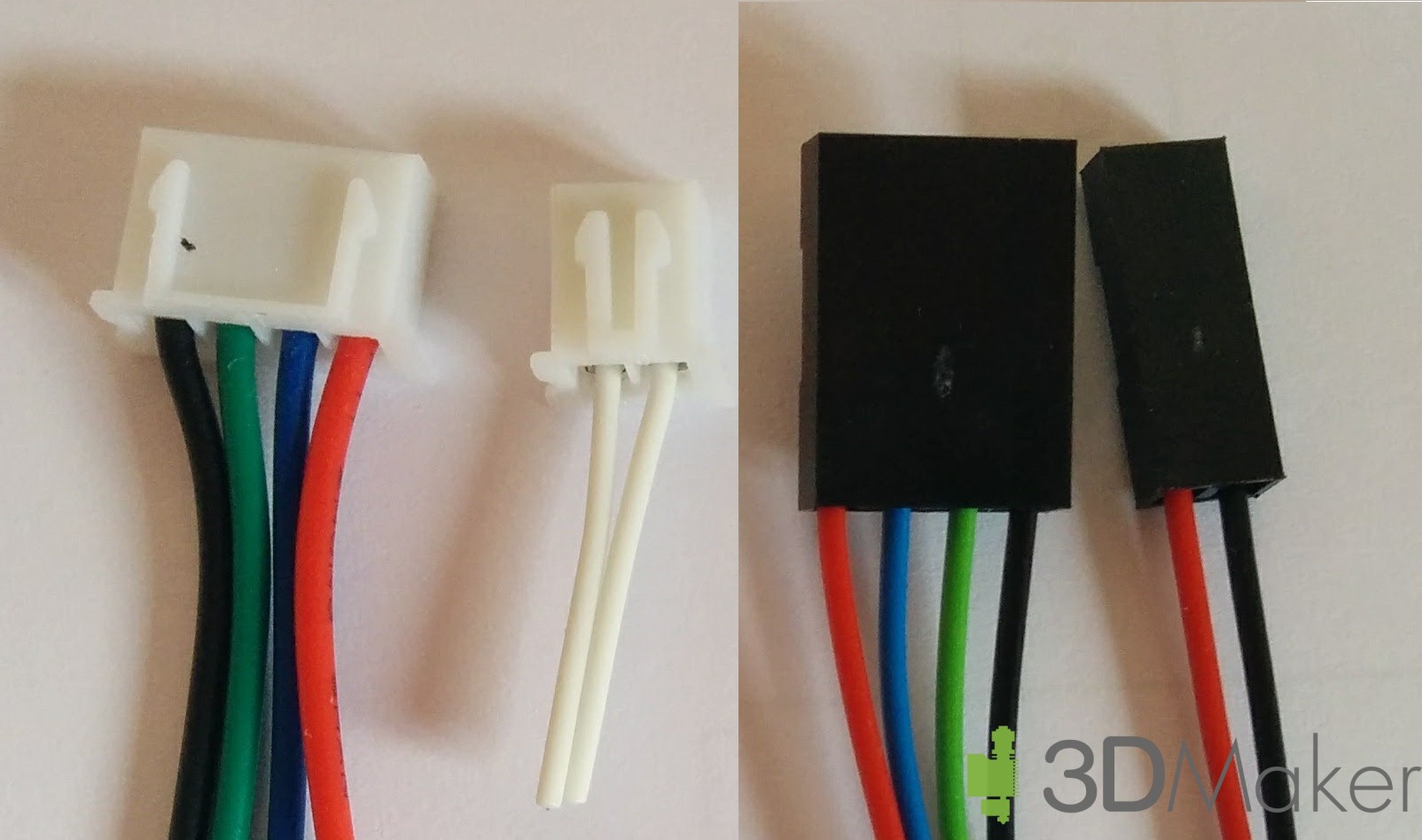
The original Mainboard uses JST connectors for the thermistors, endstops and stepper motors. The RAMPS board uses Dupont Connectors. You can either buy full kits [Aliexpress], crimped kits to solder the wires together [2pin, 4pin] or buy yourself a crimping kit [1, 2]. There are also cables for the stepper motors on Amazon [DE, US]
You will have to change at least the connectors of the z-Motors, thermistors and the endstops.
Connecting the RAMPS board
Mounting the RAMPS on the Arduino
First stick the Ramps Board onto the Arduino board. There is only one way you can mount it. The power input of the RAMPS board is on the same side as the power input of the Arduino. On cheap kits the connectors don’t line up correctly. So you have to bend them a bit to fit.
Installing the jumpers
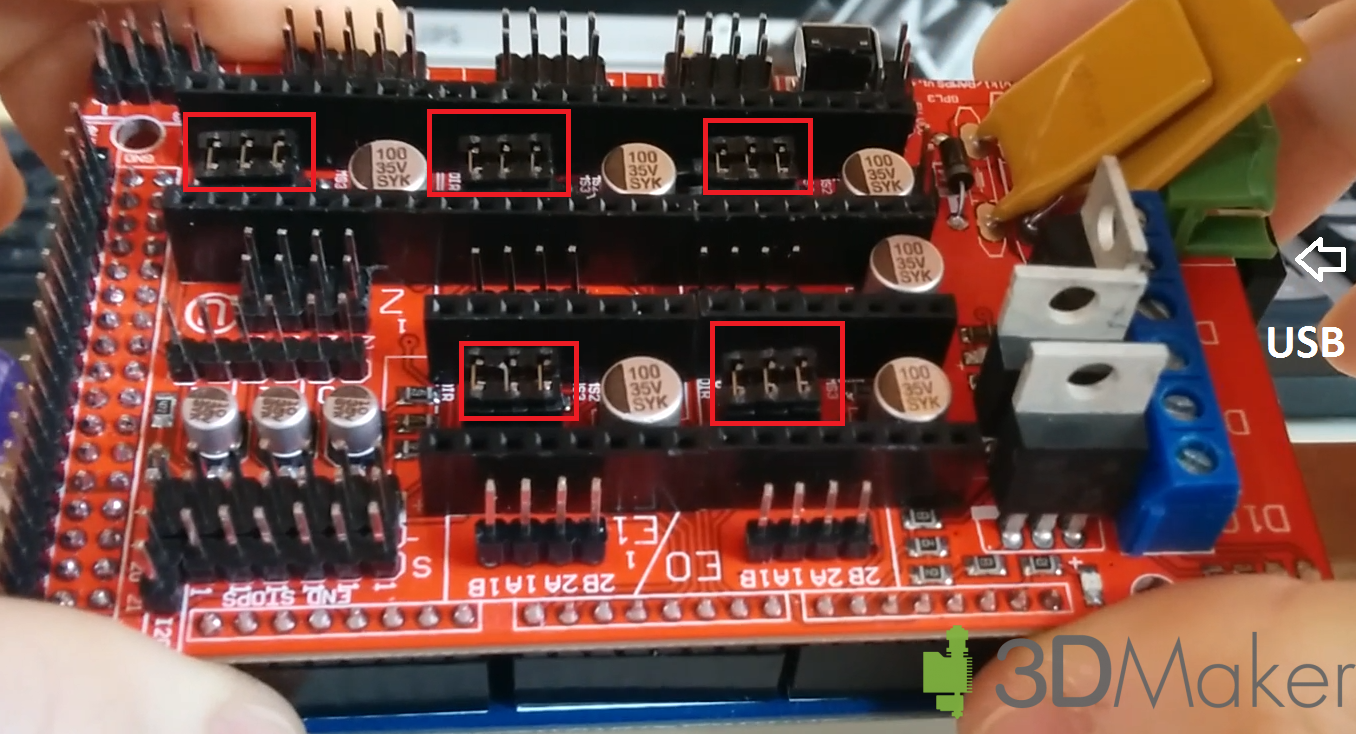
To get the finest Microstepping on the A4988 or DRV8825 you need to install all 3 Jumpers. See the picture above where to mount the jumpers. It is right below the stepper drivers.
The A4988 will be in 1/16 microstepping and the DRV8825 in 1/32 microstepping. For the TMC2100 you will have to remove all jumpers to be in 1/16 microstepping with interpolation to 1/256.
Installing the stepper drivers
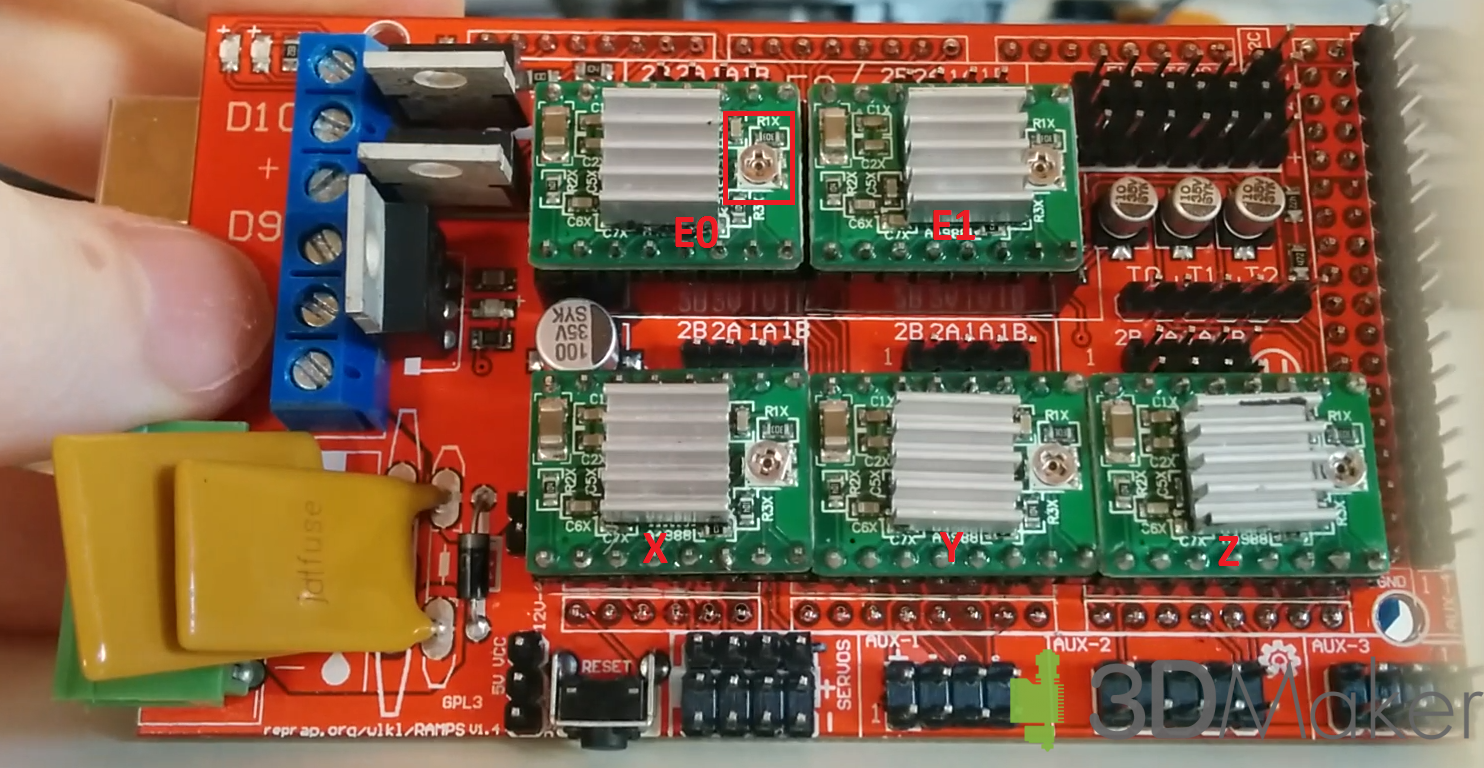
It is recommended to look at the pin layout of the stepper driver and the RAMPS. However all A4988 and DRV8825 stepper driver are built the same. So you can use the potentiometer as a reference point, but always double check the pin layout. Be carefull! If you mount the stepper drivers wrong, you will destroy them and the RAMPS board probably as well.
For the A4988 the potentiometer has to be on the opposite side of the fuses (see picture).
For the DRV8825 the potentiometer has to be on the side of the fuses. Just opposite to the A4988!
Connecting the stepper motors 
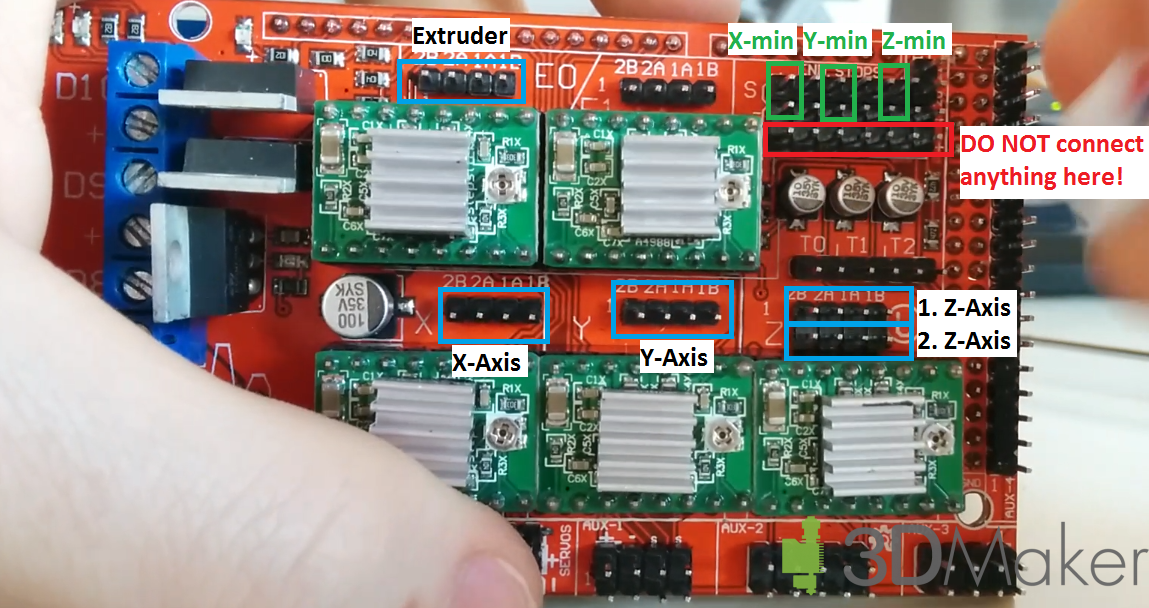
The connector of the stepper motor is just above the stepper drivers for each axis/extruder. They are all labeled on the RAMPS. It does not really matter which way you connect the stepper motors. You won’t destroy anything, only the direction will be switched. Later you can fix the direction by turning the connector around or changing it in the firmware. So when you have loaded your firmware move your axis for some mm in one direction and check that it is moving in the right direction. Also use the same colour order like in the picture.
Connecting the limit switches
Be carefull when connecting the limit switches. DO NOT connect the + and – pins with your limit switch. You are causing a short and probably destroying your RAMPS/Arduino. See the picture how to connect the limit switches. From left to right there are the pins for the min-X, max-X, min-Y, max-Y, min-Z, max-Z.
Connecting the thermistors
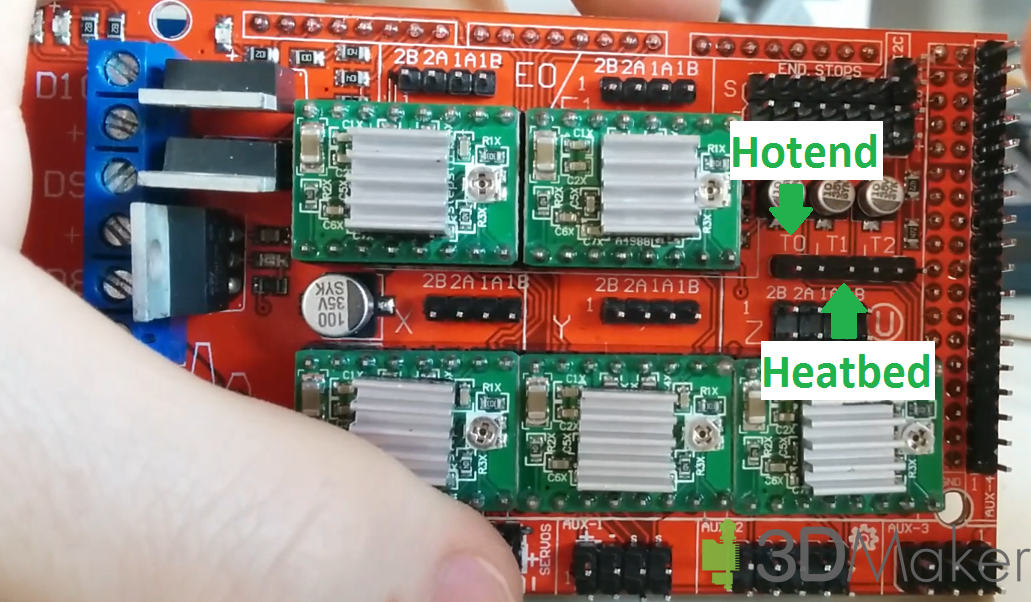
Connect the thermistor of the hotend to T0 and the heatbed to T1. The polarity does not matter.
Connecting the heatbed, hotend and part cooling fan
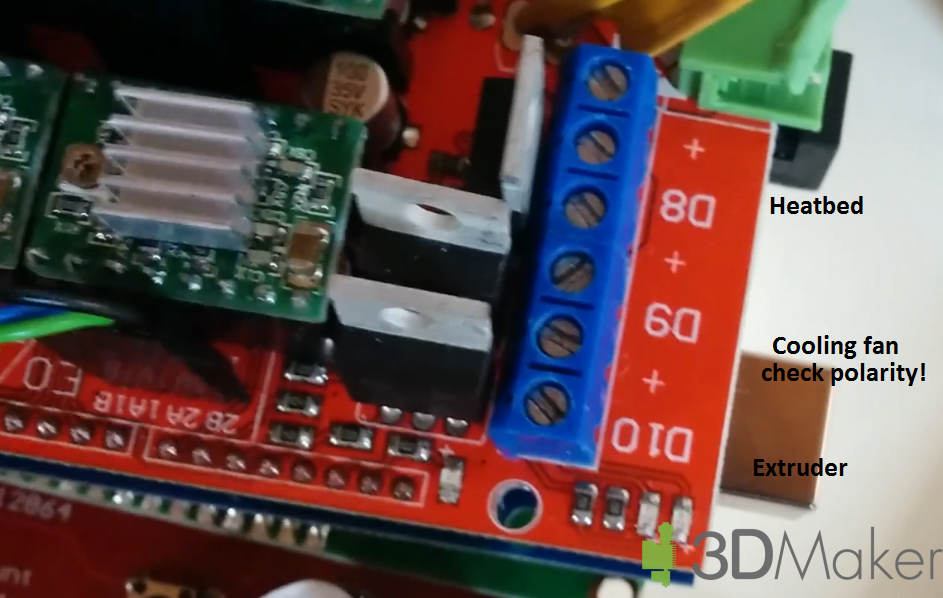
Connect the heatbed to D8. Keep in mind the connectors are at their limit providing that much current to the heatbed. There were many reports on burning connectors, both of the power input of the RAMPS and the connection of the heatbed. So I highly recommend you buying an external mosfet for the heatbed and use (end) terminals for your connections.
Connecting the heatbed, fan and hotend
The parts cooling fan connects to D9. Check the polarity of your connection, because the fan will spin the wrong way if connected wrong.
D10 connects to the hotend. Also use endterminals for the wires!
The fan to cool the coldend needs to be hardwired either to a cable with 12V or you can connect it to your external mosfet input.
Connecting the display

The last thing you have to do, is to wire the display. For that you will need a Smart adapter. The smart adapter connects to the pins at the end of the RAMPS (opposite side of the power input). This adapter will fit your old screen (2004) or the bigger full graphic LCD (12864). If the screen module has a SD Card reader, make sure you connect the two cables right (EXP1 to EXP1, EXP2 to EXP2). If they are connected wrong you will get a beeping noise (if you have a beeper on the module).
Check all connections, the orientation of the stepper drivers and so on. Then power up the RAMPS board and look for magic smoke. You then have to flash a firmware on your arduino.
Thank you very much for this tutorial!
I have one question, What kind of JSP connectors are in the Tronxy mainboard (PH, XH)? I want to buy a set to crimp my own cables.
JSP XH
Thanks again!
Have you found a solution to the high pitch noise?
Try out the Smoother. They helped a bit https://www.banggood.com/search/smoother.html?p=IV1908725094201408TX
Hi, are you sure you can connect Anet LCD 2004 to the Ramps Smart connector? I cannot
“however you will have to create an adapter, because the RAMPS uses a different Pin layout then the Anet”
You can NOT just directly connect the Display to the ramps board. Here the two pinouts.
https://reprap.org/forum/file.php?249,file=91800
Thanks a lot for the tutorial!!!
However it´s not clear to me how should I power the Arduino and the ramps! Whats the voltage for arduino? Can I plug both with the same PSU?
The power gets delivered trough the green connector on the ramps board. You just need to apply 12V to both inputs.
The input on the right is for the Arduino and all other components, but the heatbed.
The input on the left is just for the heatbed
Great tutorial, it’s very helpful. No I’m using Ramps 1.4 with my Anet A6.
What Vref are you using on A4988 with stock Anet motor?
0,45V for the x,y and extruder and 0,9 for the z-axis
Hi, do you need a 5 Volt input to power the Arduino or does it get the power from the Ramps board?
It gets the power from the 5V regulator from the Arduino or from the USB-Cable. If the Display is not working properly, chances are the regulator is broken, try to connect a usb cable, that should work.
I am using ramps 1.4 and arduino for Cartesian robot for pick and place operation, the robot doesn’t have extruder, heat bed, heat end, cooling fan and display. So my question is if I leave these the above connections empty will the board be function-able for pick and place operation and wont it cause any problem. Please reply. Thank you.
Sure, why not? The ramps is just a break out board with a couple of diodes, mosfets, … You will just have to set up the firmware accordingly